
Photographien von Roland Halbe
















Photographien von ICD/ITKE, Universität Stuttgart
















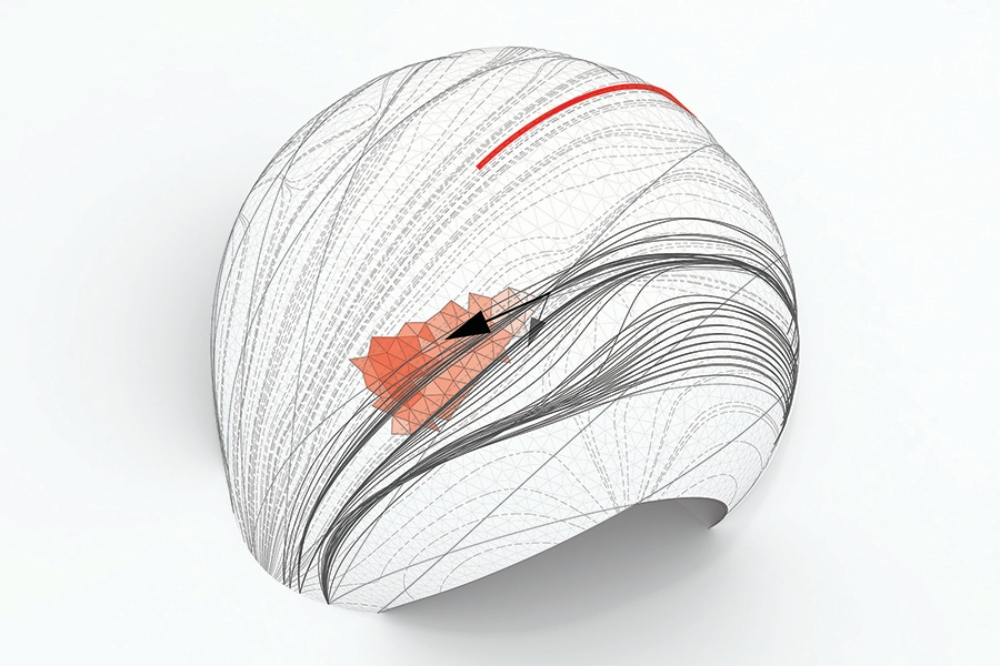
Entwicklungsprozess







ICD/ITKE-Forschungspavillon 2014-15
Der ICD/ITKE Forschungspavillon 2014-15 zeigt Möglichkeiten einer neuen aus der Natur abgeleiteten Leichtbaumethode auf. Hierbei steift ein Roboter eine zunächst weiche, mit Luftdruck gestützte Folienhülle durch von innen aufgeklebte Carbonfasern schrittweise aus. Die so entstandene extrem leichte Faserverbundschale stellt eine sehr materialeffiziente Konstruktion dar und erschließt zugleich auch neue Entwurfsmöglichkeiten für die Architektur.
Das Institut für Computerbasiertes Entwerfen (ICD) und das Institut für Tragkonstruktionen und Konstruktives Entwerfen (ITKE) setzen mit dem ICD/ITKE Forschungspavillon 2014-15 eine Reihe von Versuchsbauten an der Universität Stuttgart fort, die das Anwendungspotenzial neuer computerbasierter Entwurfs-, Simulations- und Fertigungsverfahren in der Architektur untersuchen. Der Pavillon entstand an der Schnittstelle zwischen der Forschung der beiden Institute und der Lehre im Rahmen des interdisziplinären und internationalen ITECH Master Studiengangs. Er ist das Ergebnis einer anderthalbjährigen Entwicklungsarbeit von Wissenschaftlerinnen und Wissenschaftlern sowie Studierenden aus Architektur, Ingenieur- und Naturwissenschaften.
Am Beginn der Konzeptentwicklung standen Untersuchungen biologischer Konstruktionsprozesse von faserverstärkten Strukturen. Diese sind relevant für Anwendungen in der Architektur, da industrielle Fertigungsprozesse für Faserverbundwerkstoffe auf die Massenfertigung identischer Bauteile ausgelegt sind und somit den wechselnden Anforderungen individueller Bauwerke und deren lastgerechten Auslegung nicht gerecht werden. Biologische Prozesse hingegen formen individuell angepasste faserverstärkte Strukturen auf sehr materialeffiziente und funktional integrierte Weise. Als diesbezüglich besonders interessant hat sich der Netzbauprozess der Wasserspinne (Argyroneta aquatica) herausgestellt. Im Rahmen des Projektes wurde das Netzbauverhalten von Wasserspinnen untersucht, sodass die zugrunde liegenden Verhaltensmuster und Konstruktionsregeln analysiert, abstrahiert und in ein technisches Verfahren übertragen werden konnten.
Die Wasserspinne verbringt nahezu ihr gesamtes Leben unter Wasser, wozu sie eine stabile Luftblase zum Atmen benötigt. Die Spinne errichtet zunächst ein horizontales Netz, unter dem die Luftblase platziert wird. Diese wird in einem weiteren Schritt von innen mit Fasern verstärkt. Dadurch entsteht ein stabiles Konstrukt, das mechanischen Belastungen wie Wasserströmungen standhalten kann und der Spinne ein sicheres Habitat bietet. Dieser natürliche Fertigungsprozess zeigt auf, wie faserverstärkte Strukturen an individuelle Umgebungsbedingungen angepasst und mit minimaler Hilfskonstruktion erstellt werden können.
Für den Transfer dieses biologischen Konstruktionsprozesses in eine bautechnische Anwendung wurde ein Verfahren entwickelt, bei dem ein Industrieroboter in einer luftgestützten Folienhülle aus ETFE platziert wird. Diese zunächst weiche und ausschließlich durch den Luftüberdruck getragene Hülle wird dann von innen mit Carbonfasern verstärkt. Diese graduelle Aussteifung erfolgt solange, bis sich eine selbsttragende Schalenkonstruktion bildet, die nicht weiter pneumatisch gestützt werden muss. Da die Carbonfasern hierbei nur dort aufgebracht werden, wo sie zur Verstärkung der Konstruktion benötigt sind, und die pneumatische Schalung gleichzeitig als funktional integrierte Gebäudehülle verwendet wird, handelt es sich hierbei um einen abfallfreien und ressourcenschonenden Bauprozess.
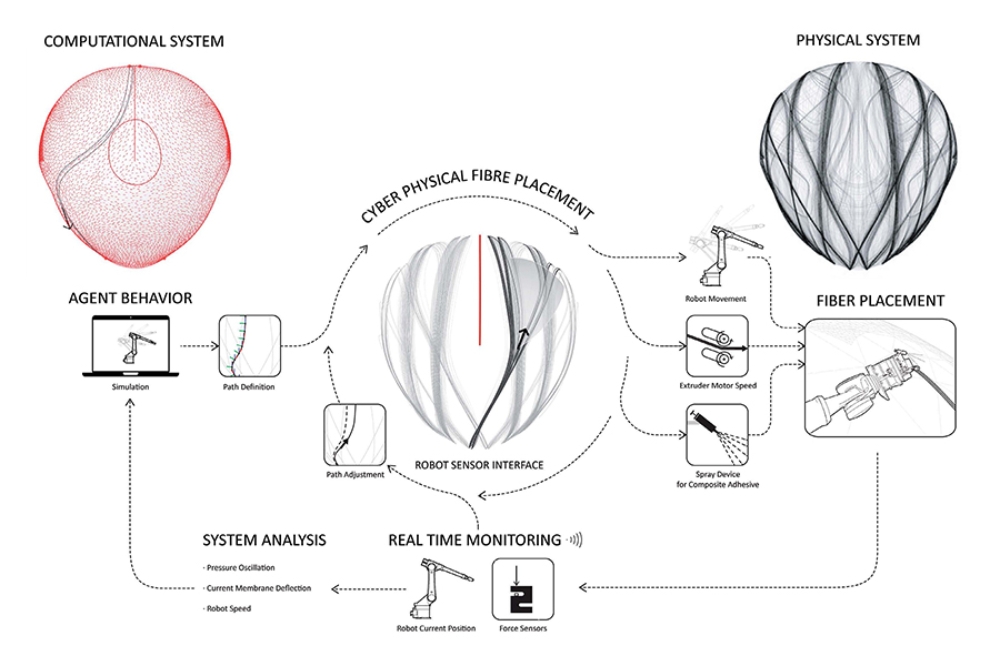
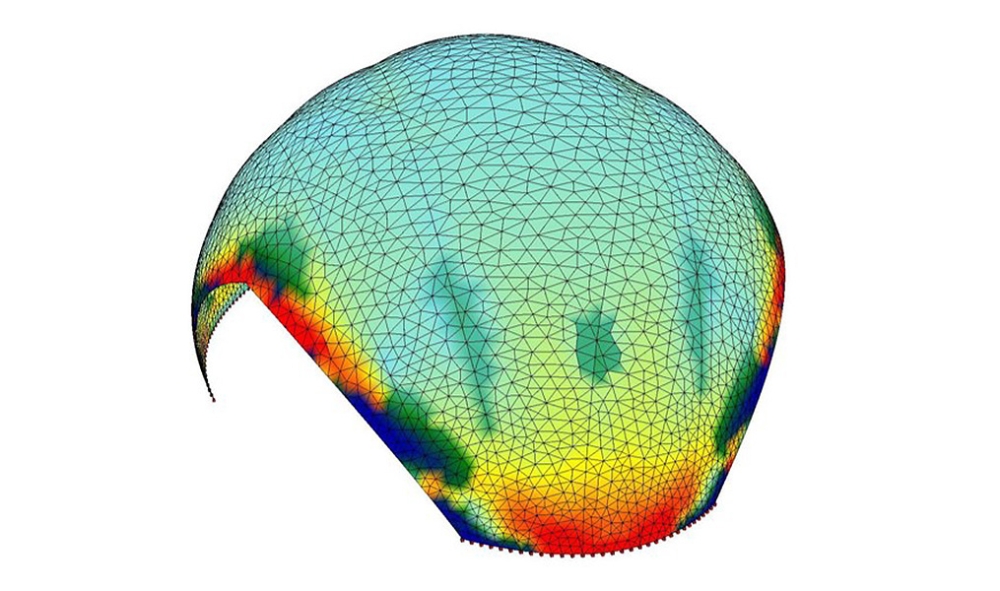
Zu Beginn des Entwurfs- und Bauprozesses wird die Schalengeometrie einschließlich der Hauptrichtungen der Faserverstärkung mittels computergestützter Formfindungsmethoden generiert und statisch simuliert. Zur Bestimmung und Anpassung der Faserlage wurde dann ein computergestütztes agentenbasierter Entwurfsverfahren entwickelt. Ähnlich der Spinne wandert hierbei ein digitaler Agent über die Oberfläche der zuvor definierten Schalengeometrie und erzeugt so den Roboterpfad für die Faserverläufe. Das Agentenverhalten leitet sich aus einer Vielzahl in Wechselwirkung stehender Entwurfsparameter ab. Der computerbasierte Entwurfsprozess ermöglicht die simultane Integration dieser Entwurfsparameter in den Generierungsprozess der Faseranordnung und Faserdichte.
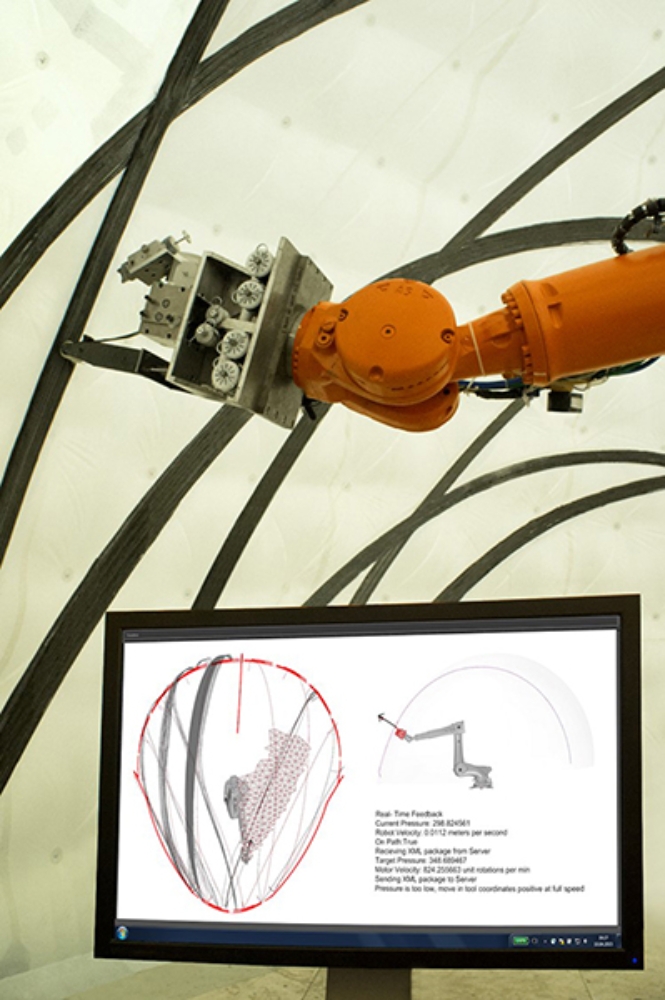
Zur Platzierung der Carbonfasern auf der Innenseite der nachgiebigen Folie wurde ein prototypischer robotischer Fertigungsprozess entwickelt. Die sich verändernde Steifigkeit der pneumatischen Schalung und die dadurch schwankenden Verformungen während des Faserablageprozesses stellen eine besondere Herausforderungen an die Roboter Steuerung dar. Zur Anpassung dieser Parameter im Verlauf des Fertigungsprozesses muss die aktuelle Position und Anpresskraft über eine integrierte Sensorik erfasst und in Echtzeit in die Steuerung des Roboters integriert werden. Die Entwicklung eines solchen cyber-physischen Systems erlaubt eine konstante Rückkopplung zwischen den realen Fertigungsbedingungen und der digitalen Generierung des Robotersteuerungscodes. Dies stellt nicht nur eine wichtige Entwicklung im Rahmen dieses Projektes dar, sondern zeigt generelle neue Möglichkeiten für robotische Bauprozesse auf.
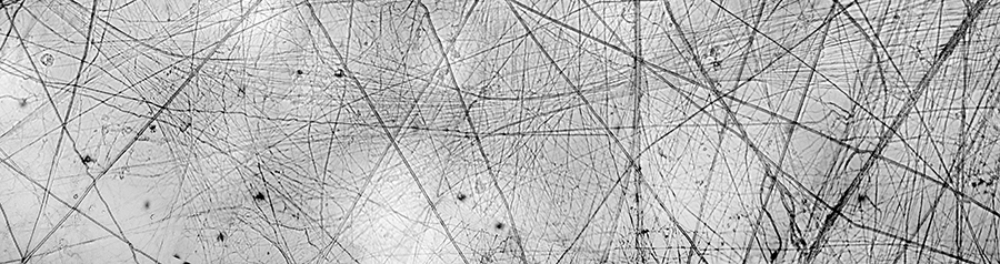
Der prototypische Charakter des Fertigungsprozesses erfordert die Entwicklung eines speziell angepassten Roboter Werkzeugs, das das fehlerfreie Platzieren der Carbonfasern auf der nachgiebigen Folie durch Sensorik sicherstellt. Die technische Entwicklung dieses Werkzeuges wird somit zu einem wichtigen Element im architektonischen Entwurfsprozess. Ebenso stellt der Prozess besondere Anforderungen an das Materialsystem. ETFE wurde als geeignetes Material für die Doppel Funktion als pneumatische Schalung und integrierte Gebäudehülle identifiziert, da seine mechanischen Eigenschaften eine plastische Verformung während des Faserlegeprozesses verhindern und es als langlebiges Fassadenmaterial bekannt ist. Um die Haftung zwischen der ETFE Folie und den Carbonfasern sicherzustellen wurde ein Kleber verwendet. Während der Fertigung wurden parallel neun vorimprägniert Carbonfaserrovingemit insgesamt 45km Länge auf 5km Roboter Pfad mit einer mittleren Geschwindigkeit von 0,6m/min abgelegt. Dieser Prozess erlaubt nicht nur die lastgerechte Platzierung des Faserverbundmaterials, sondern vermeidet als additiver Prozess auch jeglichen Verschnitt und generiert keine Prozessabfälle. Durch die doppelte Nutzung der ETFE Folie als pneumatische Schalung und Gebäudehülle wird ein hohes Maß an Funktionsintegration erzielt. Hierdurch wird sowohl der Materialverbrauch herkömmlicher Schalungstechniken als auch eine zusätzliche Fassadeninstallation eingespart. Der ICD/ITKE Forschungspavillon 2014-15 umfasst eine Fläche von ca. 40m² und einen Rauminhalt von ca. 130m³ bei einer Spannweite von 7.5m und einer Höhe von 4.1m. Das Gesamtgewicht liegt bei gerade einmal 280kg, was einem Flächengewicht von 7kg/m² entspricht.
Der ICD/ITKE Forschungspavillon 2014-15 dient als Demonstrator für die entwickelten computerbasierten Entwurfs-, Simulations- und Fertigungsmethoden und zeigt das Innovationspotential interdisziplinärer Forschung und Lehre auf. Der Versuchsbau artikuliert den anisotropen Charakter des Faserverbundmaterials als architektonische Qualität und spiegelt die zugrunde liegenden Prozesse in einer neuartigen Textur und Struktur wieder. Das Ergebnis ist somit nicht nur eine besonders material effiziente Konstruktion, sondern auch eine innovative und ausdrucksstarke Architektur.
Projektteam
Institut für Computerbasiertes Entwerfen und Baufertigung - Prof. Achim Menges
Institut für Tragkonstruktionen und Konstruktives Entwerfen - Prof. Jan Knippers
Wissenschaftliche Entwicklung und Projektleitung:
Moritz Dörstelmann, Valentin Koslowski, Marshall Prado, Gundula Schieber, Lauren Vasey
Systementwicklung und Realisierung:
WS13/14, SoSe14, WS14/15: Hassan Abbasi, Yassmin Al-Khasawneh, Yuliya Baranovskaya, Marta Besalu, Giulio Brugnaro, Elena Chiridnik, Tobias Grun, Mark Hageman, Matthias Helmreich, Julian Höll, Jessica Jorge, Yohei Kanzaki, Shim Karmin, Georgi Kazlachev, Vangel Kukov, David Leon, Kantaro Makanae, Amanda Moore, Paul Poinet, Emily Scoones, Djordje Stanojevic, Andrei Stoiculescu, Kenryo Takahashi and Maria Yablonina
WS14/15: Rebecca Jaroszewski, Yavar Khonsari, Ondrej Kyjanek, Alberto Lago, Kuan-Ting Lai, Luigi Olivieri, Guiseppe Pultrone, Annie Scherer, Raquel Silva, Shota Tsikoliya
Mit der Unterstützung von:
Ehsan Baharlou, Benjamin Felbrich, Manfred Richard Hammer, Axel Körner, Anja Mader, Michael Preisack, Seiichi Suzuki, Michael Tondera
In Zusammenarbeit mit:
Institut für Evolution und Ökologie, Fachbereich Evolutionsbiologie der Invertebraten, Universität Tübingen - Prof. Oliver Betz
Fachbereich Geowissenschaften, Arbeitsgruppe Invertebraten-Paläontologie und Paläoklimatologie, Universität Tübingen - Prof. H. James Nebelsick
Institut für Werkzeugmaschinen, Universität Stuttgart
Dr. Thomas Stehle, Rolf Bauer, Michael Reichersdörfer
Institut für Flugzeugbau, Universität Stuttgart
Stefan Carosella, Prof. Dr.Ing. Peter Middendorf
Förderung:
KUKA Roboter GmbH, GettyLab, tat aiRstructures, SGL Carbon SE, Sika Deutschland GmbH, Daimler AG, Walther Spritz- und Lackiersysteme GmbH, Lange+Ritter GmbH, Gibbons Fan Products Ltd, igus® GmbH, Peri GmbH, HERZOG Maschinenfabrik GmbH & Co. KG, AFBW – Allianz Faserbasierter Werkstoffe Baden-Württemberg e.V., Reinhausen Plasma GmbH, Reka Klebetechnik GmbH, HECO-Schrauben GmbH & Co. KG, Airtech Europe S.A., Mack Gerüsttechnik GmbH, RentES, Stahlbau Wendeler GmbH + Co. KG, CARU Containers GmbH, EmmeShop Electronics, STILL GmbH, SH-Elektrotechnik, GEMCO, Zeppelin Rental GmbH & Co. KG

Valentin Wagner
M.Sc.Wissenschaftlicher Mitarbeiter